Underwater vehicles exploring under ice shelves (left), in kelp forests (center), and near an underwater volcanic eruption (right)
WEC: wave energy converter; a device that converts the kinetic energy of ocean waves into usable electricity
AUV: autonomous underwater vehicle
by Judy Twedt
June 2040
Ocean heat waves and acidification have decimated many marine ecosystems and habitats. In the polar oceans, the influx of freshwater from melting ice sheets changed the density of seawater to such an extent that global ocean circulation patterns have shifted, altering weather patterns, disrupting agriculture and fisheries. Yet these vast, irreversible shifts to ocean biogeochemistry are not the whole story of change in the global ocean.
In the Salish Sea, kelp farms are regenerating coastal ecosystems by providing habitat for animals like otters and fish, removing excess nitrogen and phosphorus from sea water, and providing a sustainable, commercial food source. Their success is attributed, in part, to low cost operation and maintenance by resident underwater vehicles that reside on the edge of the farms in a docking station that recharges the vehicle with wave energy.
In a high school classroom in Coos Bay, Oregon, students in a biology class analyze longitudinal environmental DNA (eDNA) samples from an underwater volcano off the Oregon coast as part of a citizen science project to understand the role that methanogens play in seafloor ecology in the aftermath of volcanic eruptions. The eDNA samples are collected by scientific resident underwater vehicles that take routine samples for oceanographic sites of interest.
In Florida, saltwater intrusions from sea level rise and land subsidence massively reduced the capacity of aquifers to provide freshwater. To compensate for this loss, desalination systems at sea, powered by wave energy, pump desalinated water from the ocean to municipal water systems. The technology to maintain and repair these systems on site via autonomous vehicles brought the cost down enough that these systems became affordable.
These new ocean economies, as well as national security, are all supported by advancements in ocean engineering, and the capability of underwater vehicles, charged at sea by energy from ocean waves, to provide key services that would otherwise be cost prohibitive.
December, 2025
Underwater vehicles, whether remotely operated or autonomous, are widely used in ocean research and engineering, but recharging is complicated any way you look at it. Untethered underwater vehicles must return to a ship or a dock for recharging. Currently, ship time easily runs thousands of dollars per day, before staffing costs, and is weather limited. Another power option is mounting a dock on the seafloor to recharge a vehicle, but requires a lengthy permitting process and laying a seafloor cable connected to an onshore power facility. The capacity to power underwater vehicles on site by wave energy would eliminate the need for ship time and seafloor infrastructure, dramatically lower the operating costs and would render these vehicles accessible for a wide range of uses.
But many hurdles stand in the way.
To be powered by ocean waves, a vehicle must be able to navigate on its own into a docking station which is moving with the waves. Seawater is corrosive and often very cloudy, and everything from algae to barnacles to starfish and seaweed wants to stick and grow onto smooth submerged surfaces. Sensor data is really noisy, and the environment is constantly in motion. To overcome these hurdles, multidisciplinary scientific and engineering breakthroughs must happen simultaneously.
For over a decade, the Pacific Marine Energy Center has been aligning a constellation of testing facilities, multidisciplinary expertise, and the human relationships needed to advance these ocean technologies of the future.
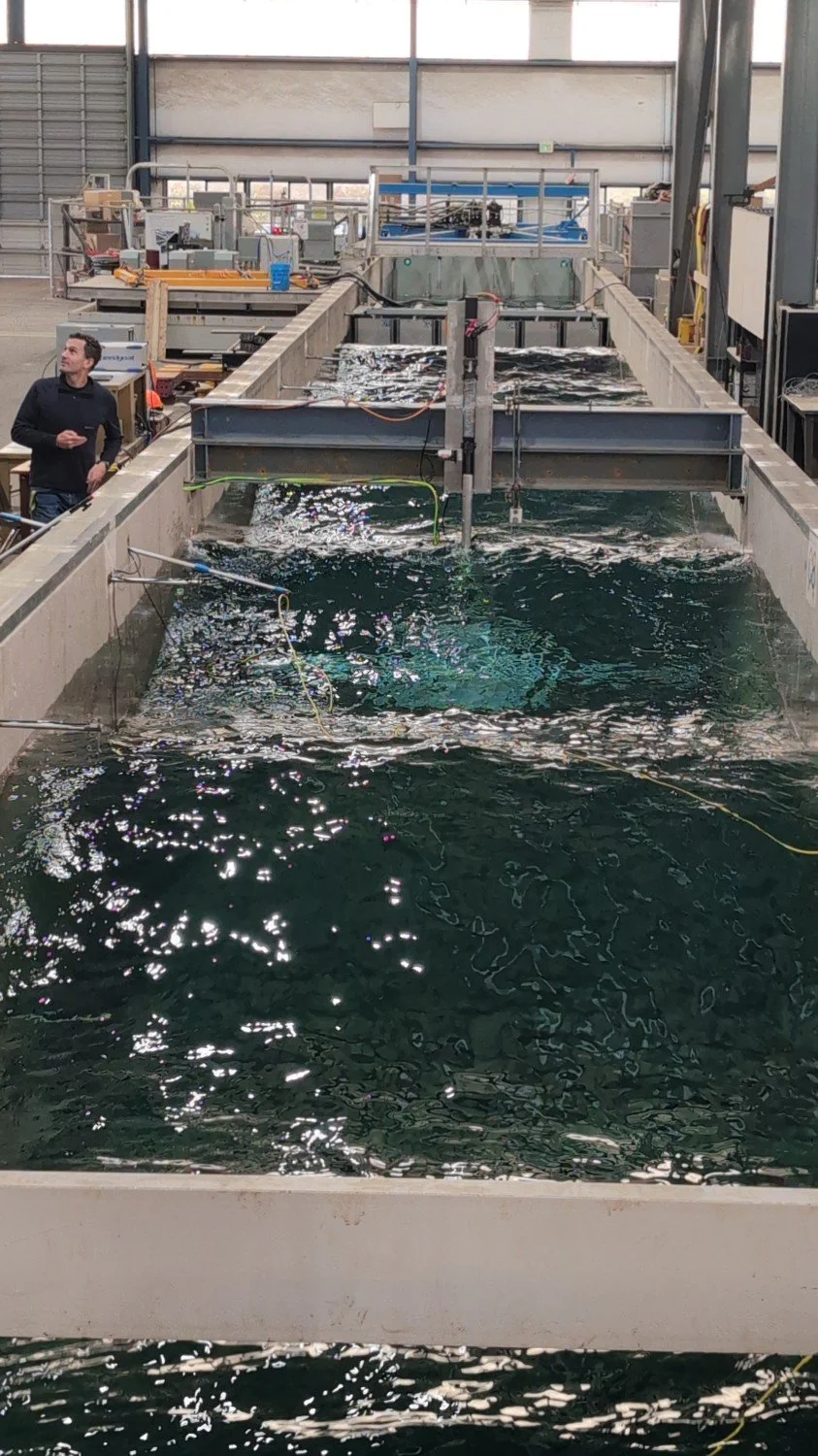
Testing in the Large Wave Flume at the O.H. Hinsdale Wave Research Laboratory at Oregon State University. Bryson Robertson, left, Photo Credit: Junhui Lou.
October, 2025
The Hinsdale Wave Research Laboratory at Oregon State University, a massive 7,500 square meter building, hosts the largest wave flume in North America. It’s a 104 meter long channel, 4.7 meters deep and designed for offshore wave and tsunami research.
Inside the lab, doctoral student Rakesh Vivekanandan watches on a monitor as an underwater robot, which he meticulously programmed, successfully navigates through 50 centimeter high waves into a submerged docking station. “Rakesh, are you sure about this?” chides Bryson Robertson, half jokingly. Robertson is a member of the project team, and also a professor in civil engineering. This team just completed the final milestone in a four year project coupling AUV docking with a WEC. Robertson and Vivekanandan are two members on this large and diverse team, led by OSU professor and roboticist Geoff Hollinger.
The team has expertise in civil, mechanical, and ocean engineering, as well as robotics and autonomous systems. Their goal: to couple and advance WEC and AUV technologies so they’re ready to test together in the open ocean on the path towards commercialization. Testing in the Hinsdale lab is a necessary stepping stone because it can mimic real world open ocean waves. “Prior work has been purely theoretical,” says Robertson. “Success means we are ready to do field ocean demonstrations.” Open ocean testing is expensive and fraught with logistical and environmental challenges, so researchers test as much as possible in the laboratory first, where experiments can be run at a fraction of the cost, before taking things to sea.
The project's long-term vision is for underwater vehicles to navigate autonomously to a wireless recharging dock that is connected to the bottom of a WEC, which converts the abundant kinetic energy from waves into electricity. But for lab testing, the wave flume isn’t deep enough for both a WEC and the dock. To work around this and make lab testing possible, the team mounted a dock to an eye beam with actuators which moved it as if it were connected to a WEC bobbing around on the surface of the ocean. For this, they built a numerical model to simulate how the WEC would move the dock, in real time.
The size of the AUV created additional challenges for the lab tests. Typically in lab testing, scale model devices are used and everything is done in miniature, but the AUV couldn’t be scaled down, which meant that the docking station also couldn’t be scaled down. That meant that tests needed full-scale ocean waves. Though Hinsdale's wave flume is the largest testing facility of its kind in North America, even this lab cannot exactly mimic the powerful waves off the Oregon coast. In order to simulate realistic ocean waves, the team had to get tricky.
Ocean waves, explained Robertson, generate two forces relevant to AUV docking. Water particle acceleration governs mass and inertial forces, and wave velocity governs drag forces, so Junhui Lou, one of the hydrodynamicists on the team, deconstructed full scale ocean waves into the two component forces that the AUV would experience in the ocean. One set of laboratory waves mimicked the acceleration of open ocean waves, and another set of waves mimicked the velocity.
In the first year, the robotic challenge was to determine how to get the robot's position while it is bobbing around so that it can navigate towards a moving target. Ocean water is extremely turbulent, or cloudy, so they experimented with sensors — many had to be custom designed by engineers on the team — using sound, pressure, and doppler velocity to help the robot determine its location in space, in order to get itself to the dock.
Vivekanandan, the PhD student who took on this challenge, chose this project for his thesis because he saw the potential for positive societal impact. After initial testing, he learned that the computations used to generate the control inputs for moving the robot were too slow, and that making this processing significantly more efficient was necessary for responsive motion. And to ensure that the AUV can charge wirelessly from any WEC, not just the one they are testing in Hinsdale, Vivekanandan ran his models on a device at UW’s Applied Physics Laboratory — another benefit of having a large, multi-institutional team. His navigation method incorporates active perception into a predictive control framework so that the AUV can estimate how the dock is moving upon approach.
Getting the vehicle to navigate into the docking station is one part of this project, but once it’s there another component is underwater wireless charging. That piece was completed by engineers Curtis Rusch and Dana Manalang from UW’s Applied Physics Lab.
The initial docking attempts were unsuccessful, and that showed the team what was needed next: collision detection. “Gavin Andres developed code that fused together data from multiple sensors to create a motion panning algorithm,” says Vivekanandan, who mentored Andres, a new masters student, on the project.
With each year of testing in the lab they made iterative improvements, and challenged the AUV to dock under bigger and more powerful waves. Each year, they succeeded.
“We were surprised by how well the systems fit together…the wireless charging, the autonomous systems, the marine energy devices, all of these components are at the cutting edge and we are putting them together and exploring this new way of interacting with the ocean,” said the project lead and Principal Investigator, Geoff Hollinger.
This October, the AUV docked under the most challenging lab conditions the team could generate. “The AUV performed very well, it docks without any problem. We ended up using the largest wave heights we can create in the wave flume, ” noted Junhui Lou, with a palpable sense of satisfaction. Now the team is wrapping up this project, and they’ve met their goals. Next step? Open ocean testing, and team members from the Hawaii Marine Energy Center having been on the project to ensure readiness for testing in their Wave Energy Test Site, WETS.
Acclaimed oceanographer Sylvia Earle famously said “We know more about the surface of Mars than we do about our own ocean.” In 2025, it’s still true that we have better maps of mars than we do of the seafloor which covers 70% of our own planet’s surface, but this team is advancing the technology that may change that.
To learn more about the unified simulation framework, see:
https://www.sciencedirect.com/science/article/abs/pii/S0306261924002605
Project Team Members
Oregon State University:
Geoffrey Hollinger (project lead and Principal Investigator), Rakesh Vivekanandan , Gavin Andres , Chris Holm, Liam Vincent
Dr. Bryson Robertson, PEng , Junhui Lou , David Okushemiya , Matthew Leary, P.E. , Aidan Kane, Belinda Batten
Project Management: Brenda Langley
University of Washington Applied Physics Lab:
Curtis Rusch , Dana Manalang , Jim Thomson, Ama Hartman, Brent Salmi
University of Hawaii, Manoa:
Patrick Cross , Michael Krieg, Norman Chung, Zhenhua Huang, Zhuoyuan Song and Nic Ulm, PhD
This project is based upon work supported by the U.S. Department of Energy’s Water Power Technologies Office (WPTO), within the Office of Critical Minerals and Energy Innovation (CMEI). Award Number DE-EE0009449.