
02 August 2019
By Ali Trueworthy
Imagine jumping into a lake, pool, or the ocean. As you hit the water, you go under quite a bit further and faster if you pencil dive than if you belly flop. Just as your size and shape, what a researcher might call your “geometry,” impact how you move through water, so does a wave energy converter’s. Oscillating body wave energy devices are a type of wave energy converter (WEC) that collect energy from the relative motion between separate parts of the device. The size and shape of the device and the implementation of its control system dictate how it moves through the water, and therefore how much energy it can collect along the way.

In Reference Model 3, the buoyant float moves up and down with incoming waves while the center shaft remains still. The model was created by rearchers at the National Renewable Energy Lab and Sandia National Labs for WEC-Sim.
There are many options for the size and shape of such a device and its control systems. Hannah Mankle, a graduate student with Professor Bryony DuPont in Mechanical Engineering at Oregon State University, works with researchers from Sandia National Laboratory to help determine the optimal size, shape, and control system for maximum power conversion. To do so, Hannah uses optimization algorithms.
An optimization algorithm uses results from numerical models to test different sizes, shapes, and control systems to find the one that satisfies the “objective.” In Hannah’s work this means the WEC produces the most power at the lowest cost, which is represented by an LCOE, levelized cost of energy, approximation.
Previous work has been done to optimize geometry or controls, but Hannah’s work will be the first to optimize the two together. The numerical models simulate the WEC’s hydrodynamics and mechanical response to passing waves to predict the power output of a particular device. Within the optimization algorithm, the WEC size (and eventually shape) is selected and passed to an evaluation step, which optimizes the control for that given geometry to provide a power output. The result is used by the optimization algorithm to decide the next size (and shape) to select.
It would take a long time to test every possible combination of size, shape, and control scheme, so Hannah is testing four algorithms to see which can produce the highest quality solution in the least amount of time. Each algorithm uses a different method of choosing the next solution to test, attempting to arrive at the best one as quickly as possible without testing every combination.
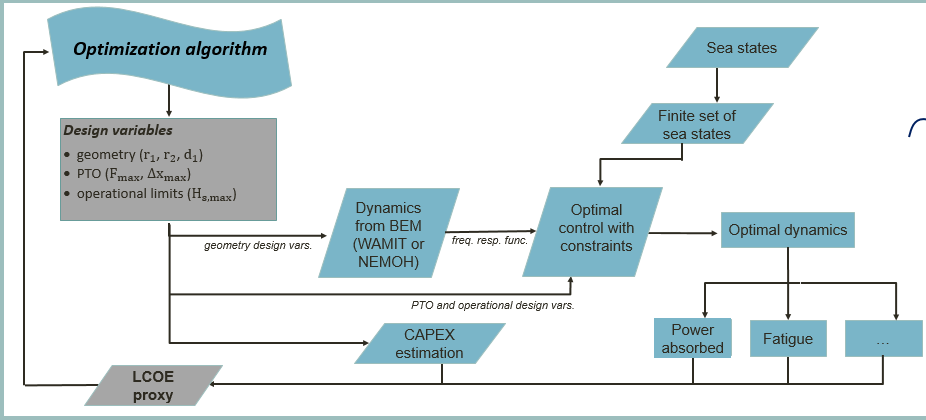
Diagram shows the many inputs and numerical models used in Hannah’s Optimization Algorithm which include Boundary Elements Methods (BEM), which indicate how a device responds to wave action and an evaluation step which includes controls optimization. The controls optimization was developed by researchers at Sandia National Lab.
To test each algorithm, Hannah is starting by performing size optimization without various shapes. She is confident that the optimal WEC size will “butt up against the constraints” when looked at independently. In other words, she already knows the largest size will probably produce the best results, but the single objective optimization is a necessary first step for validating previous work and comparing optimization methods. She is excited to move forward and add in varying shapes.
The options for the shape of the WEC will be defined by a curve radially rotated about a center point. The curve is referred to as a spline, a shape which can be found in a lot of drawing software and is created using multiple mouse clicks- one per vertex. For the first iterations, the WEC model Hannah will use is a standard point absorber, known as Reference Model 3, and she’s optimizing the shape of the float section.

Hannah Mankle is a Masters student in Mechanical Engineering at Oregon State University. She is a part of the Design Engineering Lab and started her research in wave energy as an undergrad in 2017.
Hannah’s research will help researchers and developers understand the relationship between geometry and controls, and how geometry effects performance. As her team moves forward, she hopes to include more variables for geometry and controls, guiding early design decisions for the best possible wave energy converters.